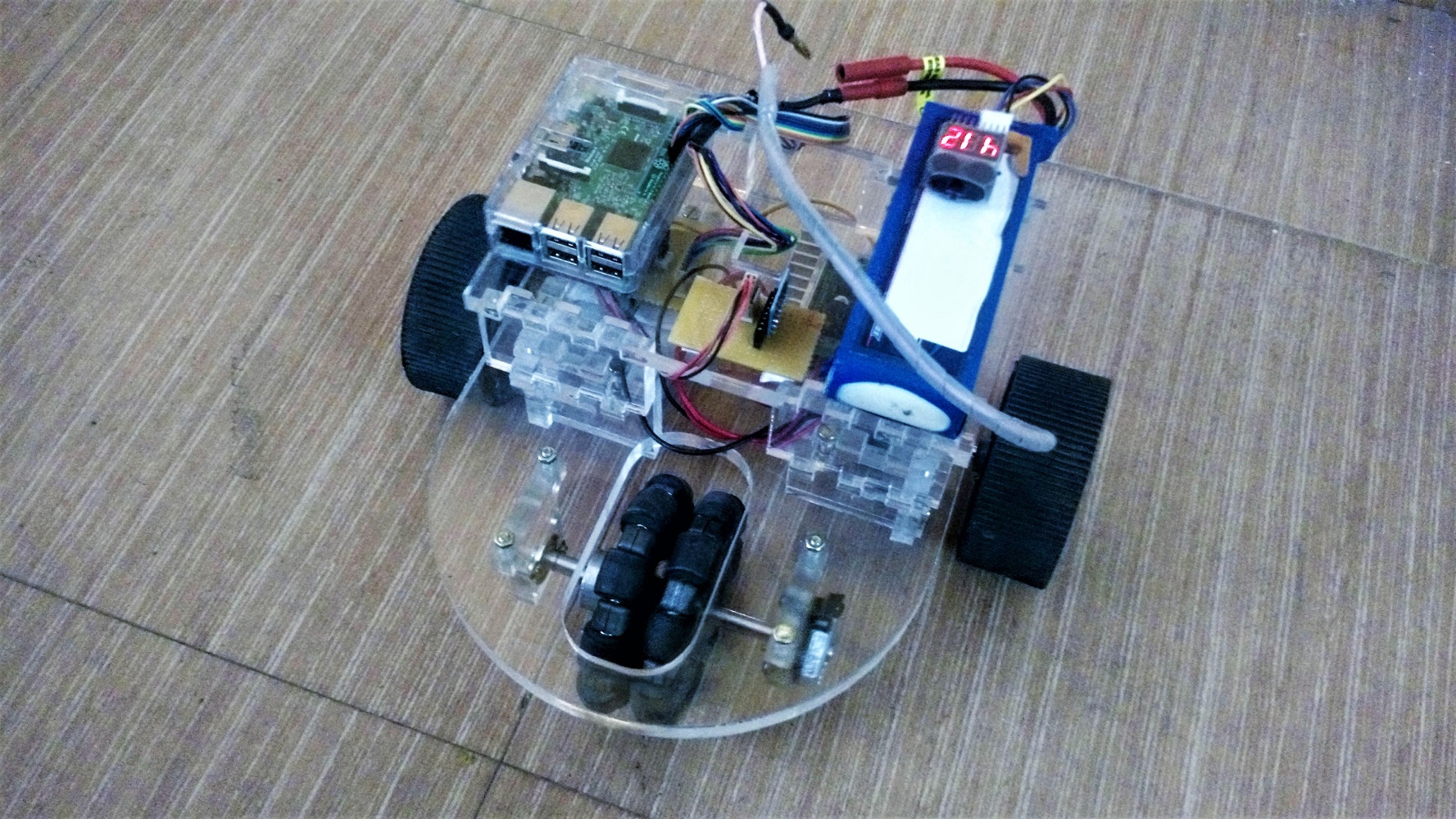
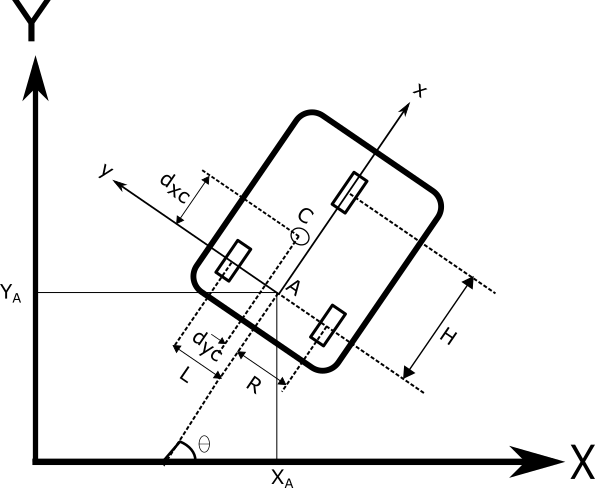
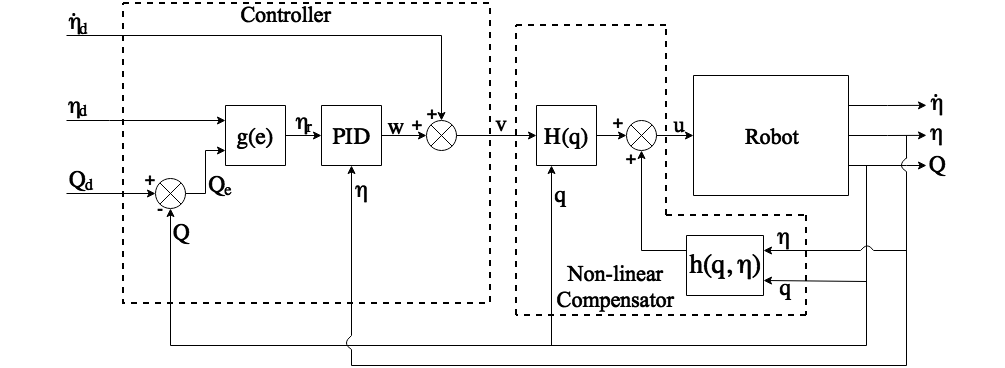
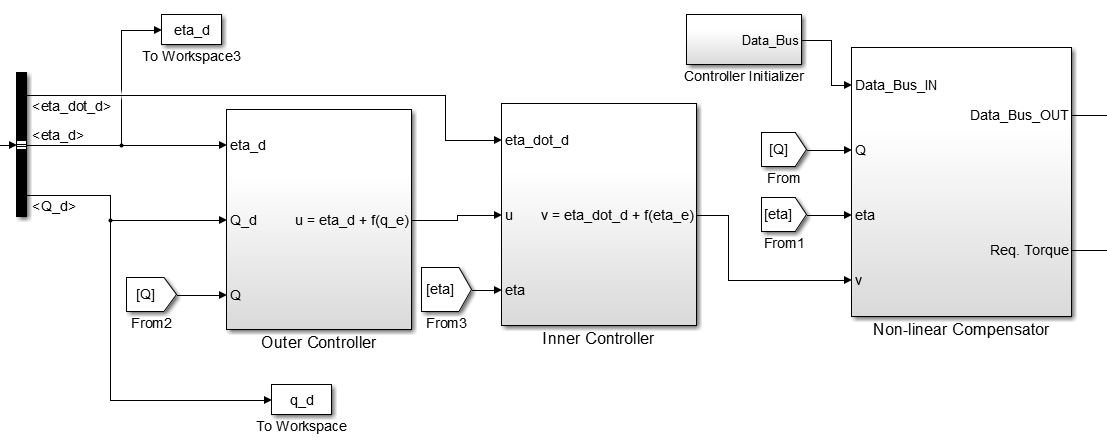
In this work, I formulated the dynamics of a general non-holonomic 3WMR and proposed a controller design for stable tracking. The novel 3-stage controller included a Lyapunov stability-based controller for reducing position error, a PID controller applied on the robot velocity, and a non-linear compensator to calculate motor torques using inverse dynamics. Simulation results showed acceptable behaviour even on introduction of random artificial errors in the system. We even designed and manufactured a mobile robot to test control algorithms using RaspberryPi 3, encoder & gyro.
This work was later published IEEE workshop for Advanced Motion Control 2018
Media: