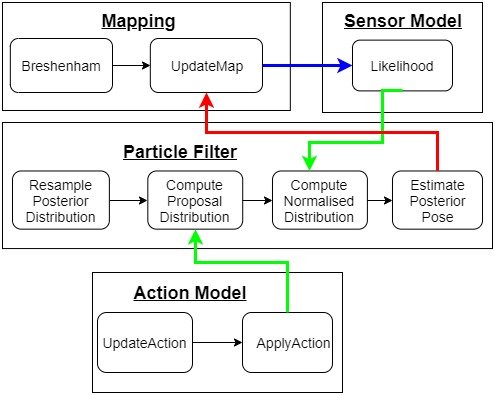
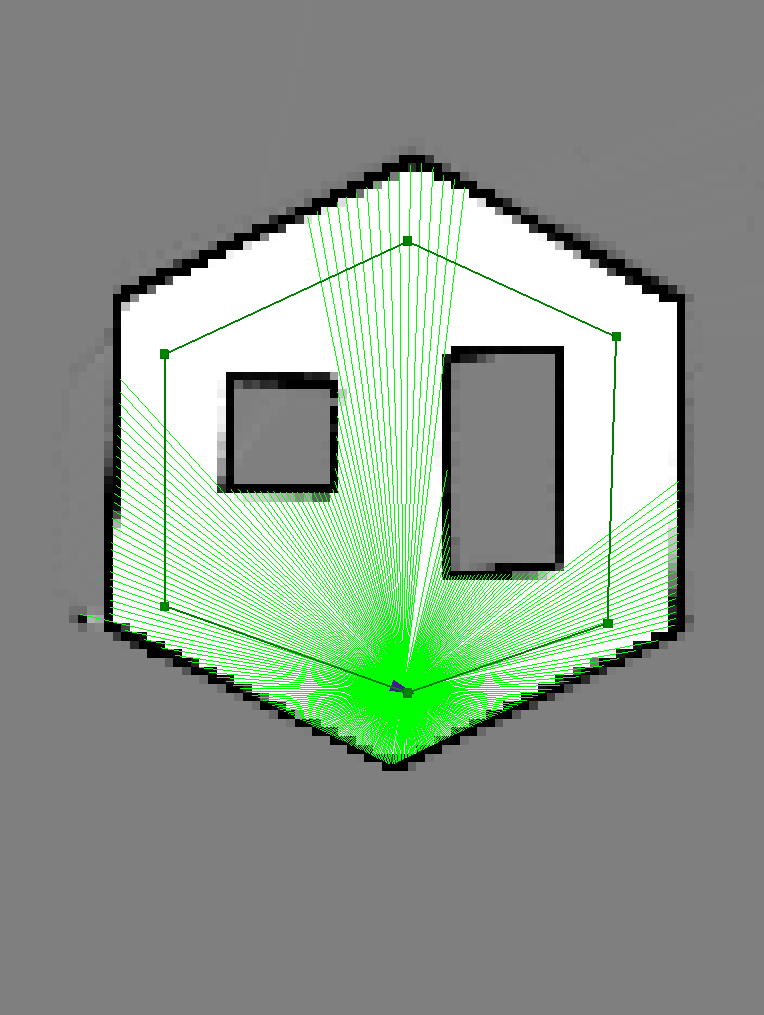
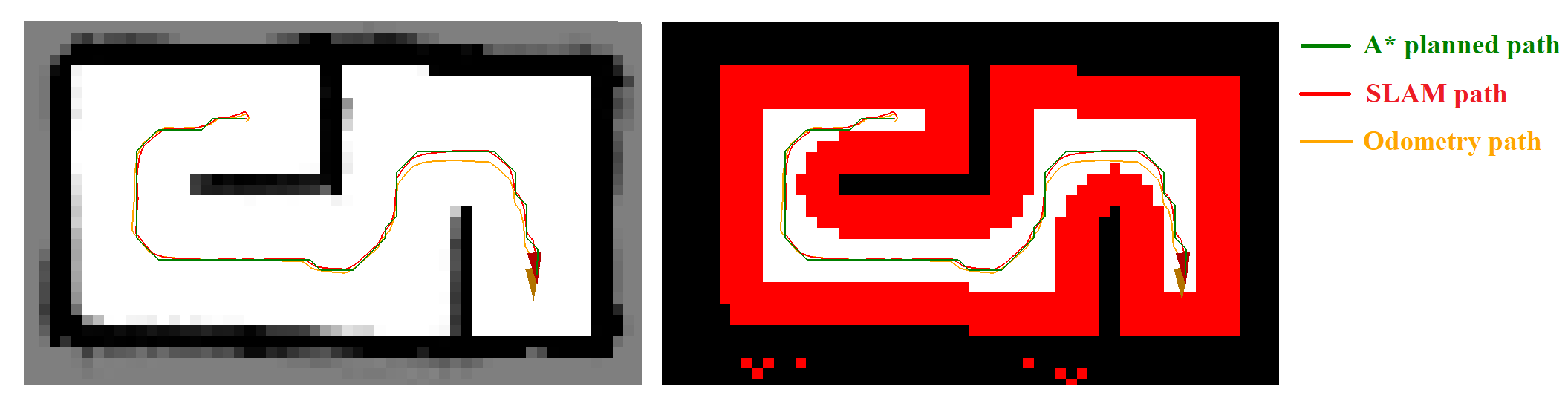
In this implementation, we used particle filter localization and occupancy grid mapping for Simultaneous Localization and Mapping of a Ground Robot. We also developed a software module to enable the bot toexplore new frontiers in the SLAM map and reach them using A* path planning. The bot was also equipped with a camera and could detect objects marked with April-tags and pick them using a gripper
We used 2D LiDAR (for mapping and correction step in localization) and IMU (for propogation step in localization). A calibrated pi-cam was used for vision. The low-level controller were programmed on a beagleboard, and a Raspberry-pi was used to run the SLAM, path-planning and vision algorithms
Media: