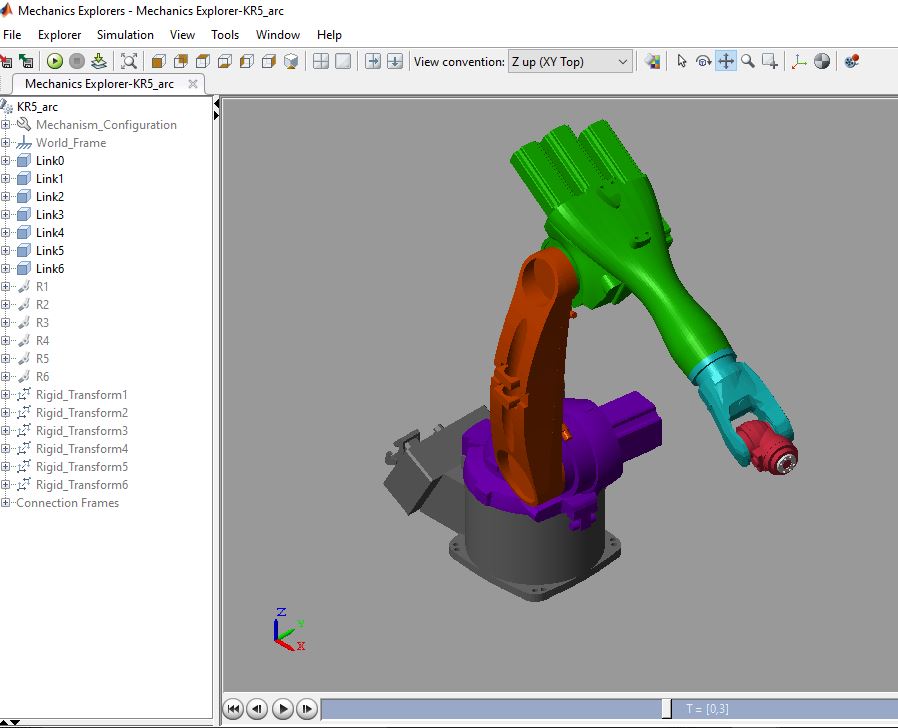
Here I show some of work I did in my undergrad final project. The KR5 robot in our Robotics lab lacked a simulator. So I developed a kinematic simulator for KR5-arc robot ousing MATLAB SimMechanics and borrowed STL files and DH parameters of the parts from the manual.
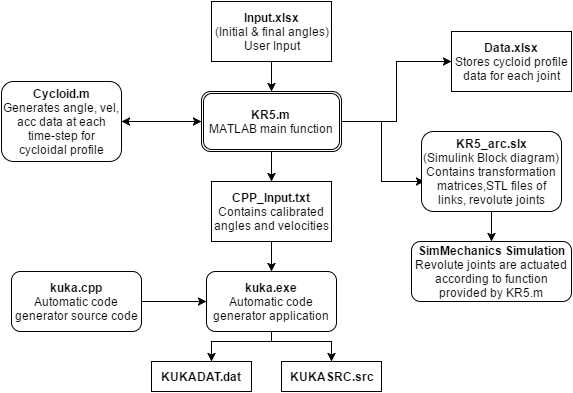
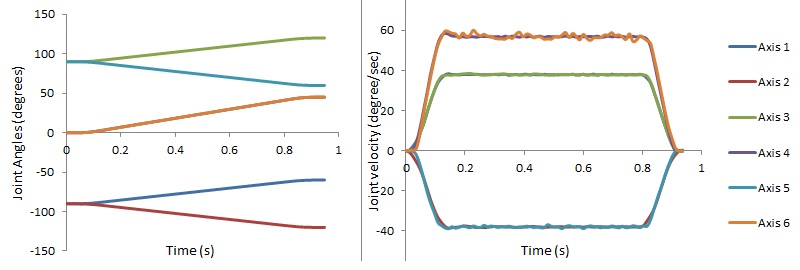
I also built an automatic KUKA Robot Language code generator to translate the simulated motion on to the real robot. In the process I also implemented a technique for traversing any joint-space trajectory using series of differential Point-to-Point motions
Media: