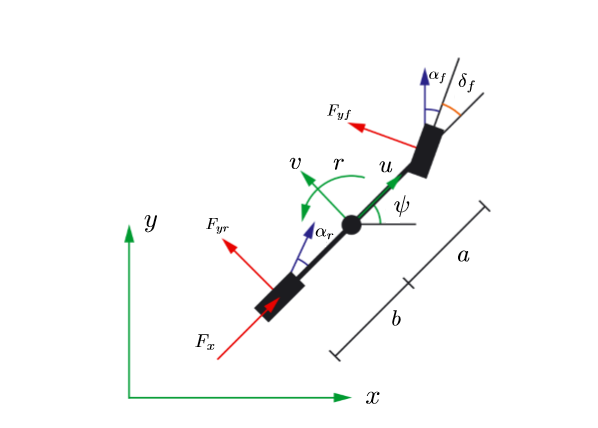
In this implementation, we attempt to control a car using trajectory optimization techniques. The car is assumed to follow the dynamics of a bicycle model. To achieve stable and safe tracking, we are using discrete-time Model Predictive Control.
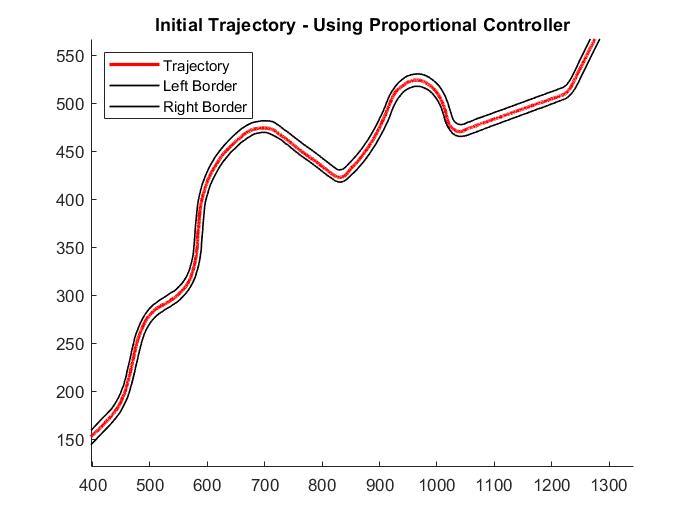
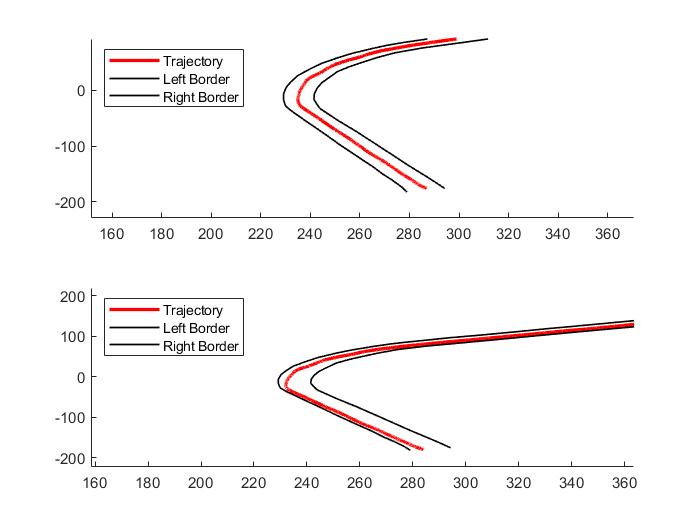
A discrete proportional controller (on the error defined as a function of the deviation from the center-line of the race-track) is used to generate an approximate trajectory that our car will follow. We will use MATLAB’s ode45 solver to generate this trajectory. We then use this trajectory to linearize our model and attempt to implement a discrete MPC controller to follow this trajectory. We solved the MPC optimization problem using MATLAB’s quadprog.
Media: